ROS gmapping
ROS based simulated differential drive robot used to map the unknown environment using gmapping package which utilizes the 2D lidar sensor data. The robot is controlled manually using teleop keyboard ros package.

ROS based simulated differential drive robot used to map the unknown environment using gmapping package which utilizes the 2D lidar sensor data. The robot is controlled manually using teleop keyboard ros package.
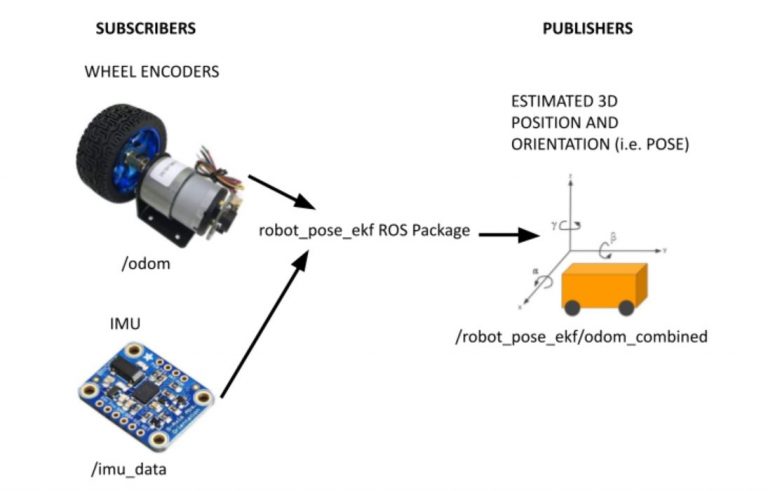
🤖🦾 MPU6050 odometry and Wheel Encoder odometry Fusion.
🤖 Build a system for stationary sound source localization by cubical microphone array consisting eight microphones placed on four vertical adjacent faces whi...
🤖 Autonomous Service robot that can do mapping, generate map and navigate around by using dynamic path planning.
👶 Developing innovative and affordable solutions designed to enhance and modernize healthcare services in Nepal.


Comments